我校张树忠博士和阿尔托大学Fluid Power Group联合在《Automation in Construction》上发表论文



2019年1月,我校汽车与机械工程学院张树忠博士课题组联合芬兰阿尔托大学的Tatiana Minav、MattiPietola等在国际权威期刊Automation in Construction杂志上发表了题为“The effects of control methods on energy efficiency and position tracking of an electro-hydraulic excavator equipped with zonal hydraulics”的论文,揭示了基于流量匹配的复合控制方法对分布式直驱液压挖掘机的性能影响。我校张树忠博士为第一作者,同时该研究工作得到了芬兰阿尔托大学流体传动与控制中心MattiPietola教授课题团队的Tatiana Minav等的大力支持。
在我国经济快速发展以及能源紧缺、环境污染、人力成本上升等问题日益严重的状况下,结合快速发展的伺服驱动技术,研发一种可实现挖掘机低能耗、高效可靠运行的新型液压节能系统,促进挖掘机的混合动力化、电动化以及自动化,是国内工程机械制造企业适应社会发展所亟需解决的问题之一,也是全世界科研机构及工程机械装备制造企业的研究热点之一。
电液控制系统可分为阀控和泵控系统。阀控系统,响应快、精度高,可单泵驱动多个执行元件,但节流损失大、能量效率低,在许多应用场合都受到电气传动的挑战,如Volvo推出了应用机电作动器的纯电挖掘机。与阀控系统相比,泵控系统几乎没有节流损失,且能回收制动能和重力势能,具有节能、发热小和和降低装机功率等多方面的优势。近年来,泵控系统中,采用变转速控制的电静液作动器得到了快速的发展,部分厂家开始推出工业型的电液作动器(Bosch Rexroth、KYB等),是目前电液控制技术的发展方向和研究热点之一,但在工程机械领域的研究尚属空白。
该论文以微型液压挖掘机对研究对象,建立分布式直驱挖掘机的多学科整机模型,对模型进行了局部验证,并提出了基于流量匹配的复合控制方法。研究结果表明在三种典型的工况下,所提出复合控制方法较PID控制具有更好的动态性能和节能性。
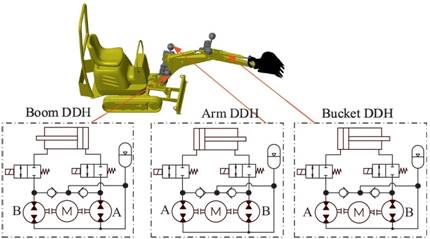
图1采用单电机双泵分布式直驱液压的液压挖掘机原理图
在这项研究中,研究人员首先提出了基于流量匹配的复合控制方法,建立了涵盖机械、电气、液压、控制的多学科整机模型,包括电机、伺服驱动器、液压泵、液压缸、管路、蓄能器、油液、控制系统等子系统,并对模型进行了局部验证,结果表明所搭建的整机模型具有良好的准确性。
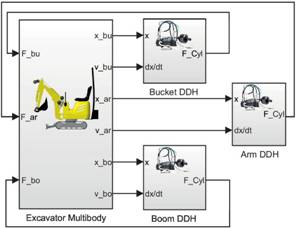
图2采用单电机双泵分布式直驱液压的液压挖掘机模型
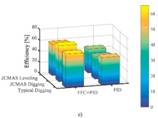
以普度大学的典型挖掘循环、Japan Construction Mechanization Association的挖掘和平整循环三种工况作为模型输入,基于PID控制和所提出的复合控制开展了位置跟踪性、系统能耗、系统效率三方面的对比,结果表明采用所提出的控制策略后,位置跟踪均方根误和最大误差分别差减小了20-87%和35-83%,同时在不考虑能量回收的情况下能量消耗降低了15%、系统效率提高了11-24%,即所提出的控制策略显著地提高了系统的跟踪性能和系统的效率。
图3 三种工况的位置跟踪性能、能耗、系统效率对比
下一步将建立分布式直驱挖掘机样机的测试平台开展试验研究。此外,通过不同的压力预紧方式来提高位置跟踪性能和系统效率,对直驱单元进行紧凑化、热平衡分析等,以进一步推动工程机械工业的电动化、自动化进程。(科研处供稿)